

I created my own APRS-IS client which collects data from the raw stream of APRS packets. Main filtering made with “balloon” icon filter. Additionally accepted only packets, that have IGate’s call sign and qAR/qAO/qAo/qAS constructs inside the path, so the client processes only packets received over RF.
Map made using a custom plugin, that pulls data from a custom API. API code also serves as a backend for the Telegram bot https://t.me/NearbyBalloonBot or Viber-bot nearbyballoonbot
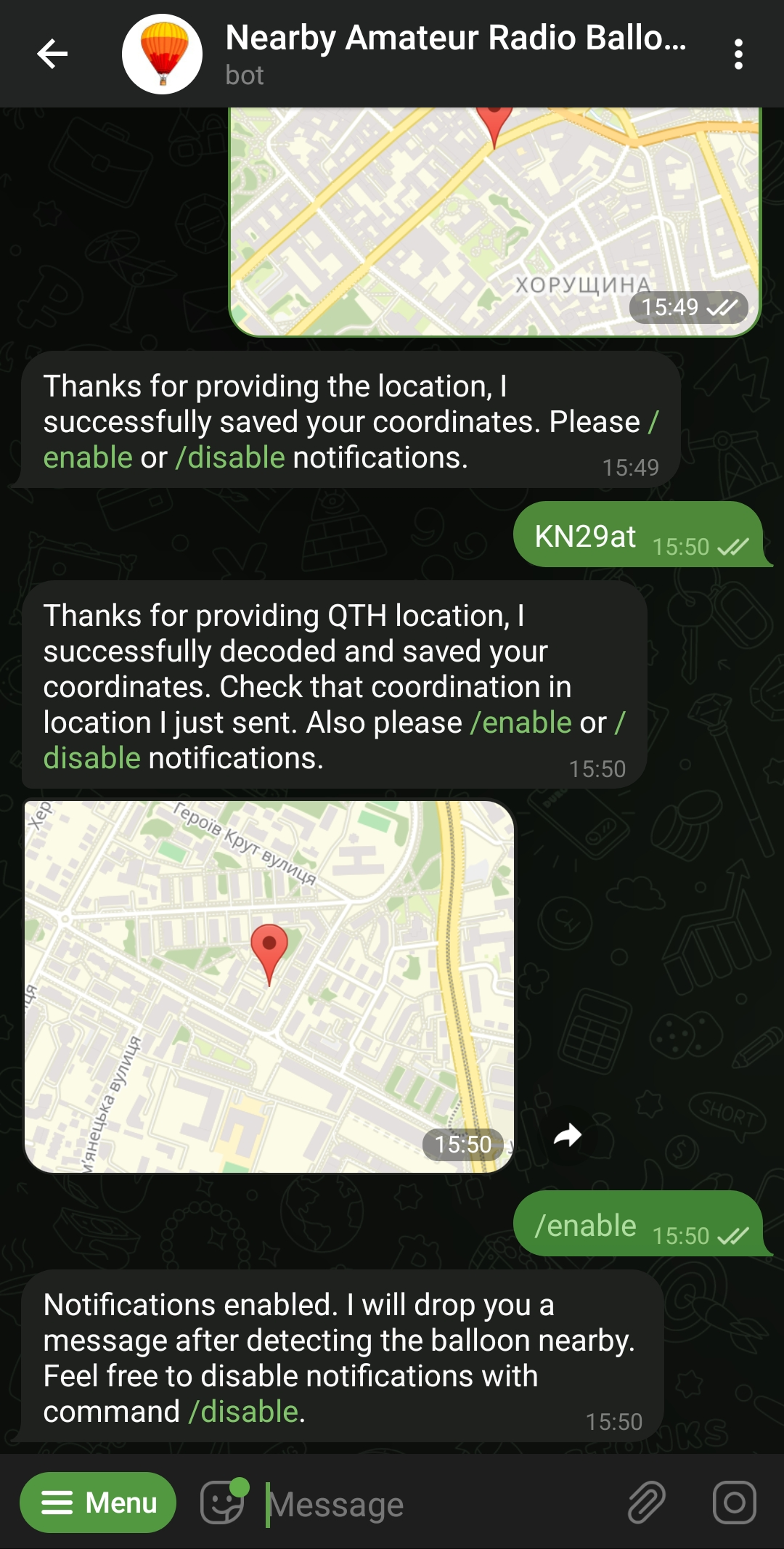
Telegram bot Nearby Amateur Radio Balloons NearbyBalloonBot
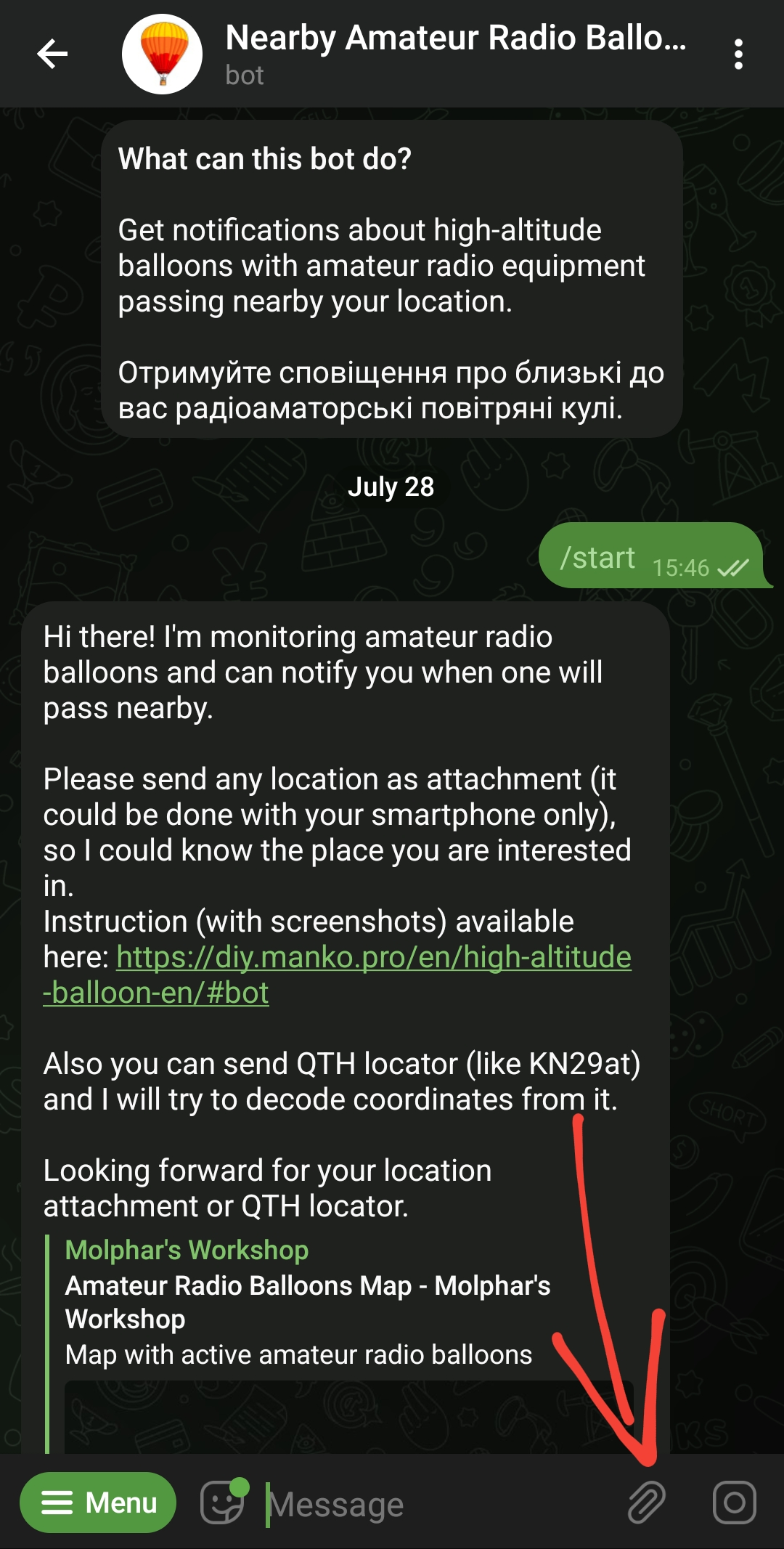
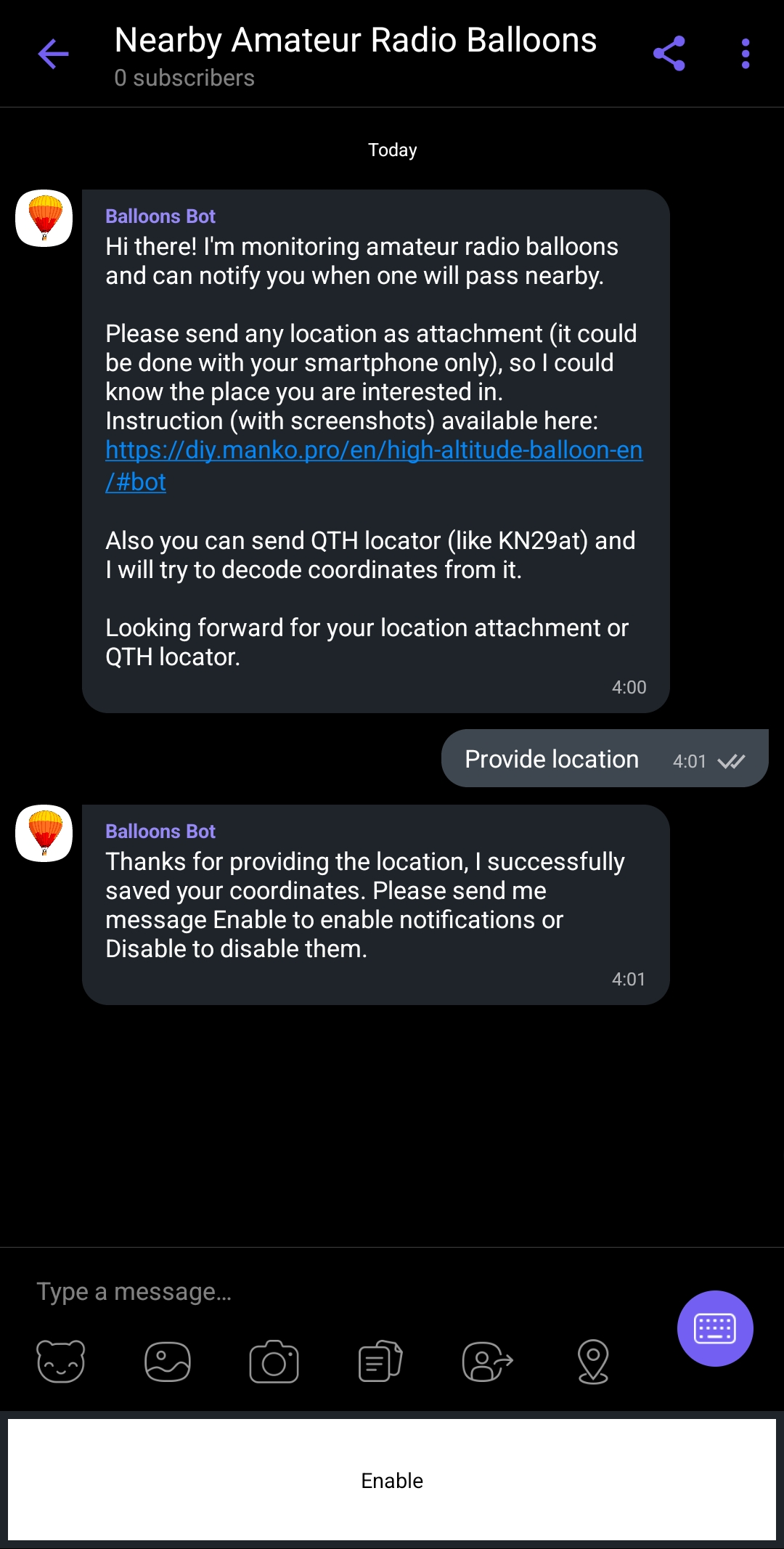
Bot sending notifications about amateur radio balloons passing by your location. After activation with /start command, you need to send the location as an attachment.
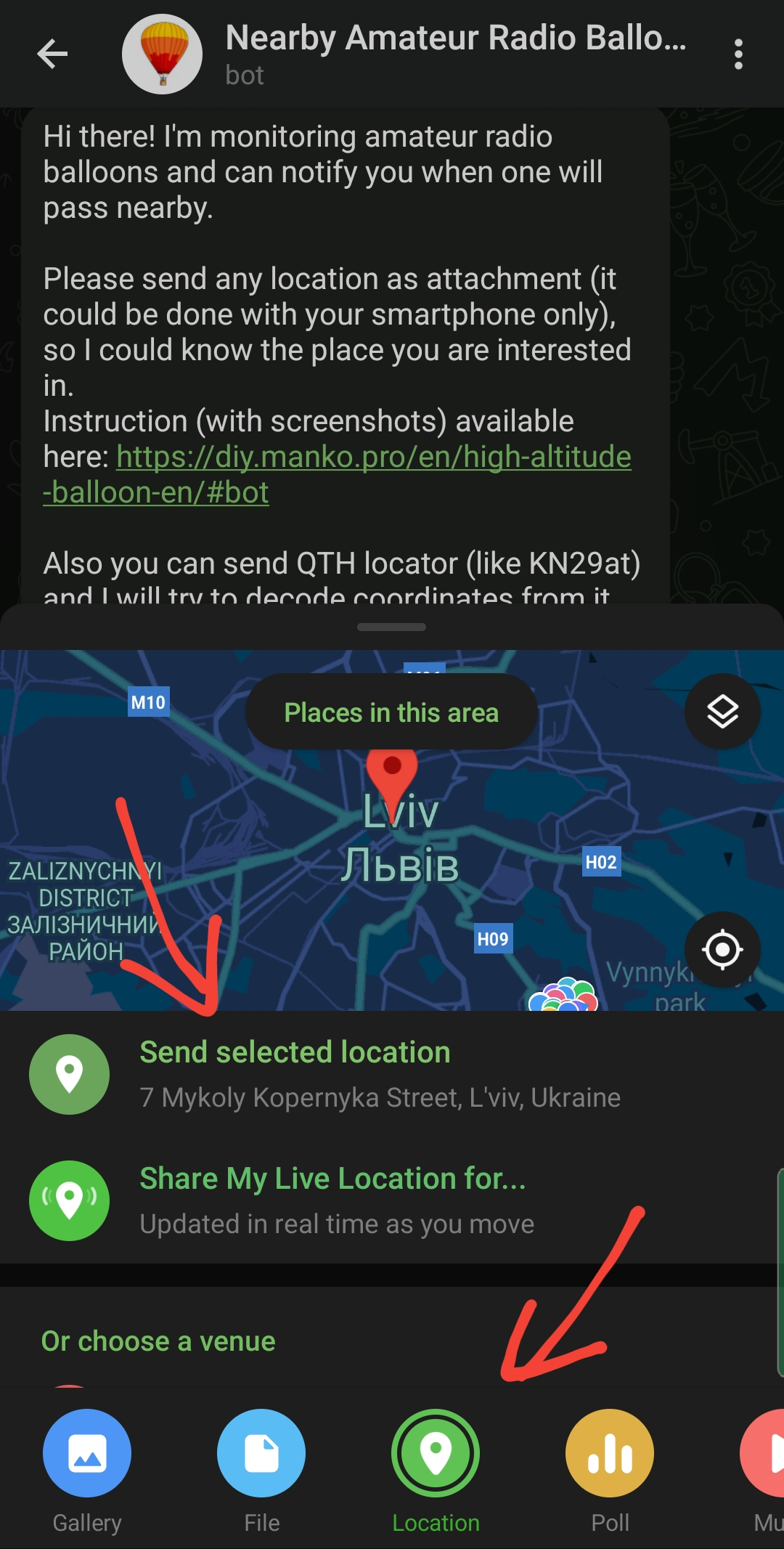

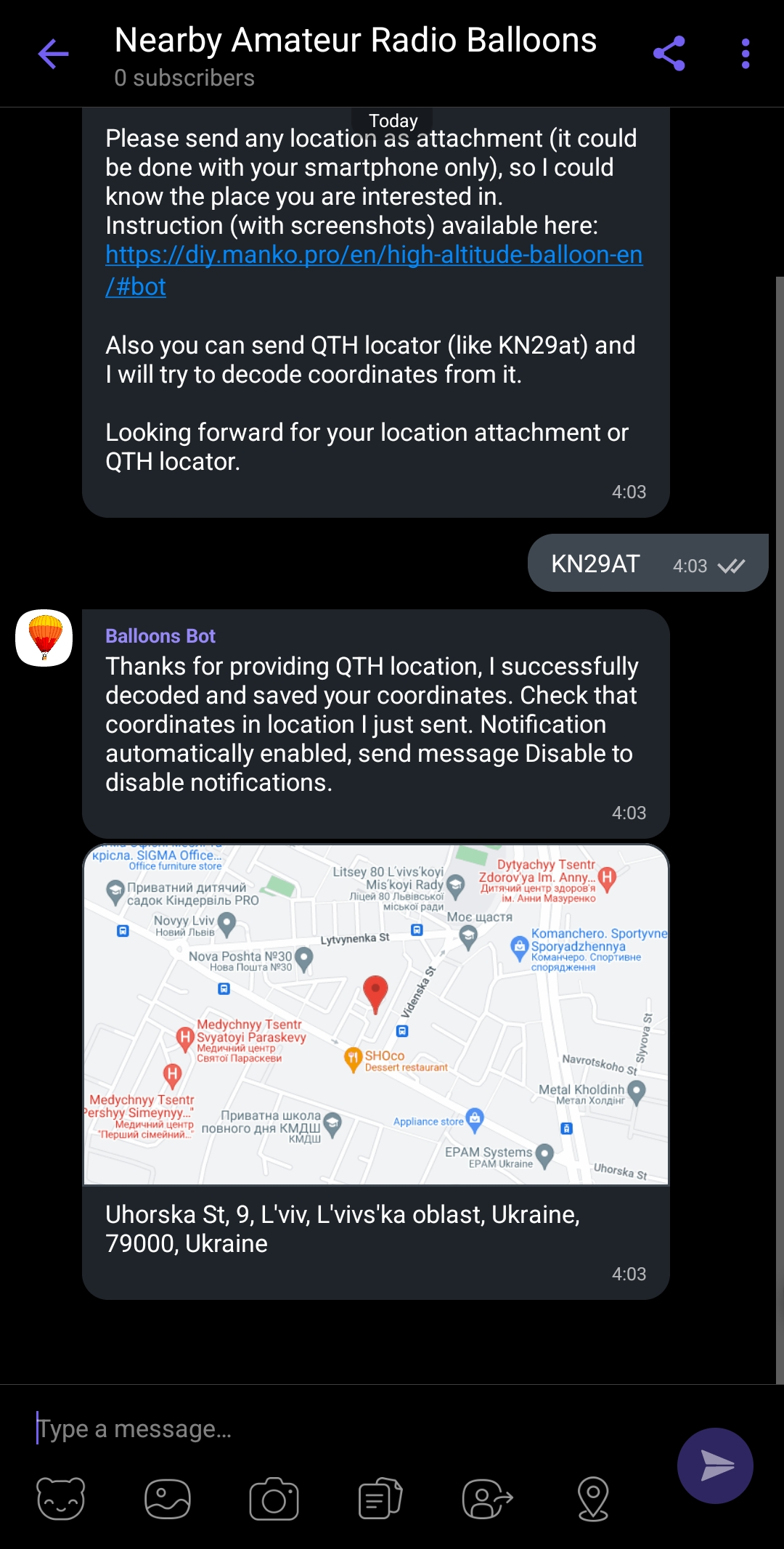
Next, you can activate notifications with the command /enable. Alternatively, you can send your QTH locator and the bot will try to decode it to coordinates.
Every 5 minutes bot loads all active balloons and checks the distance between the balloon and every activated user. If the distance is lower than 300 kilometers, the user will get a single notification. Repeat notification will be sent only after 3 hours if the balloon is still within the user’s range.
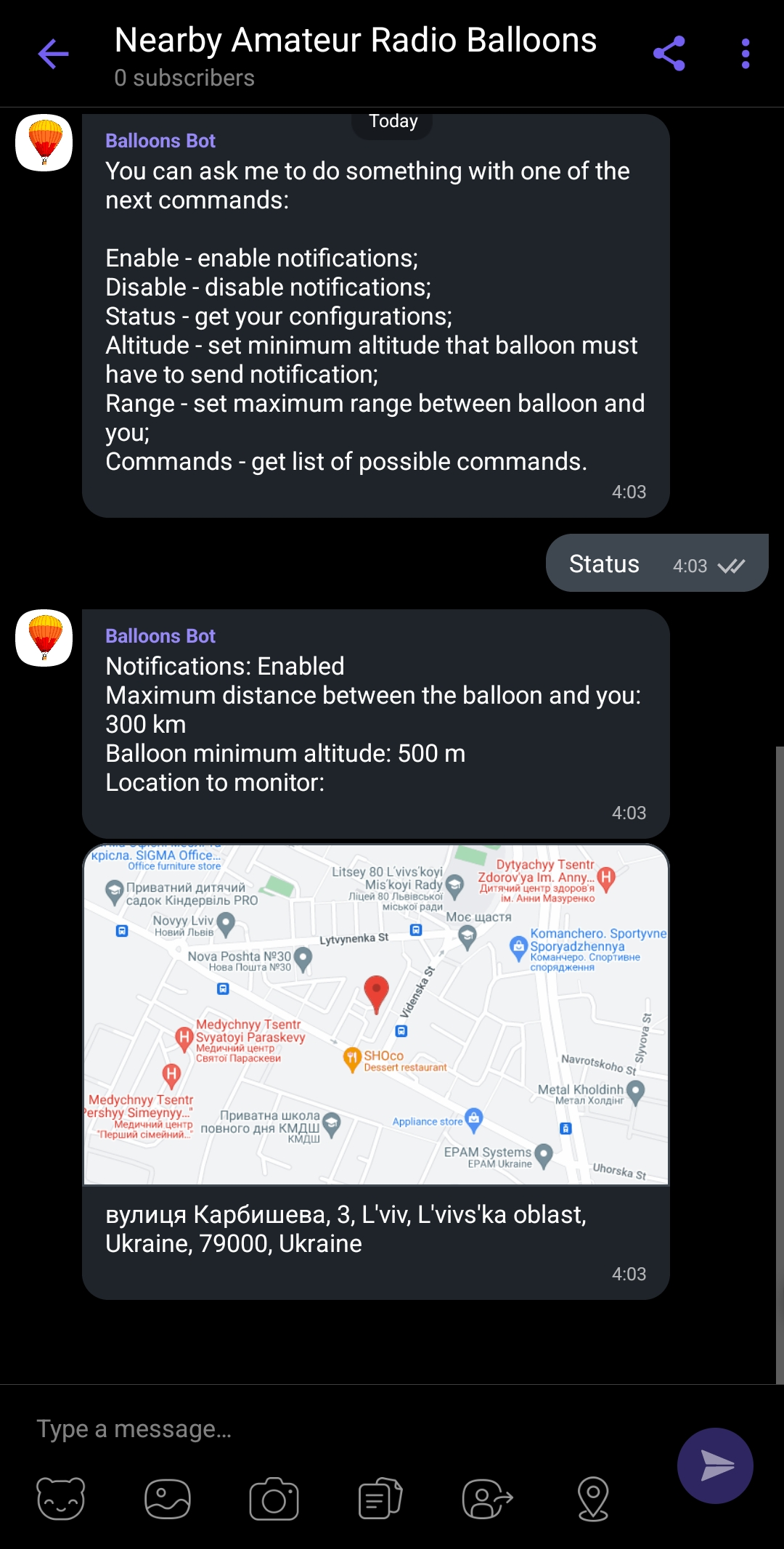
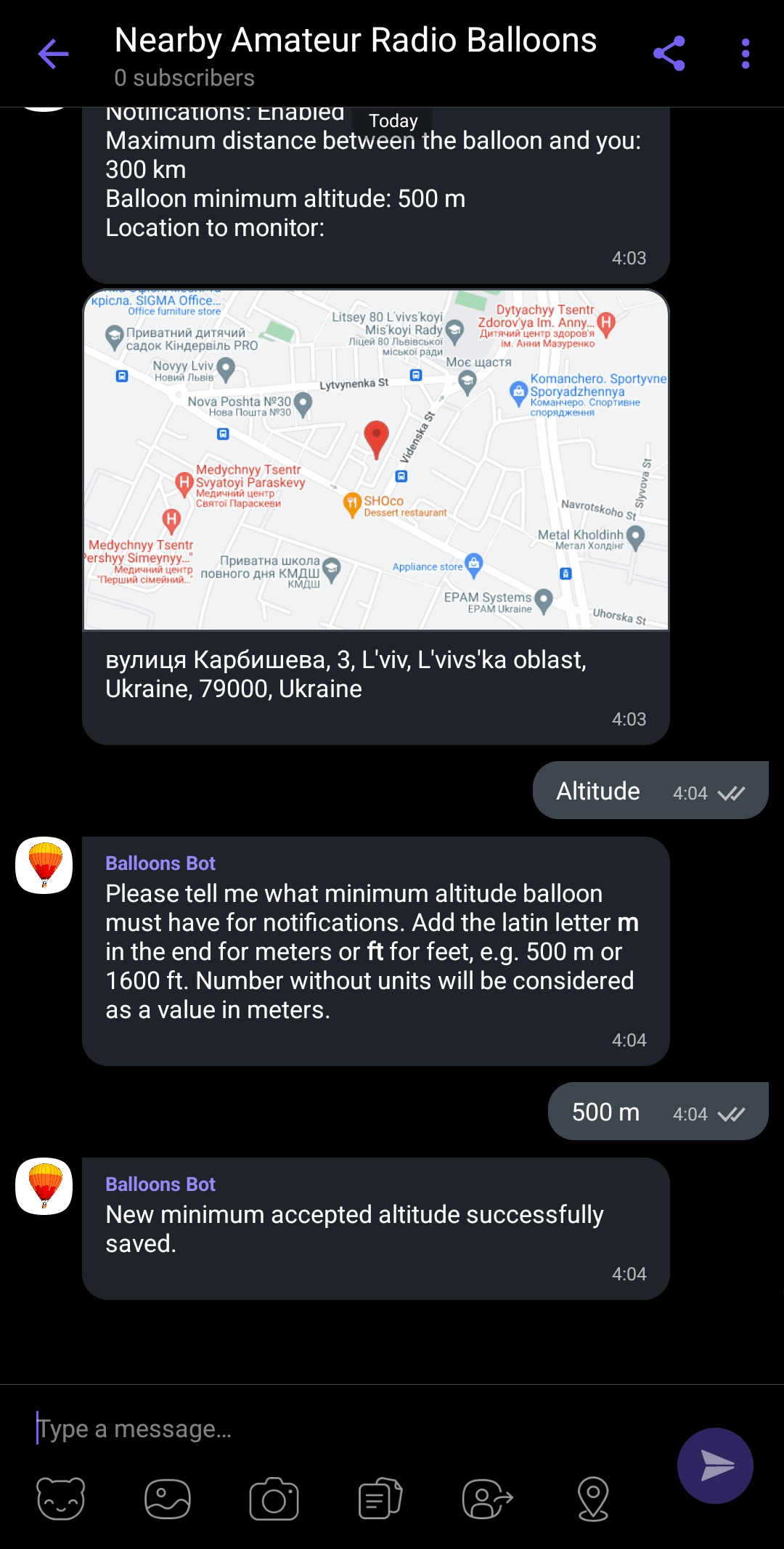
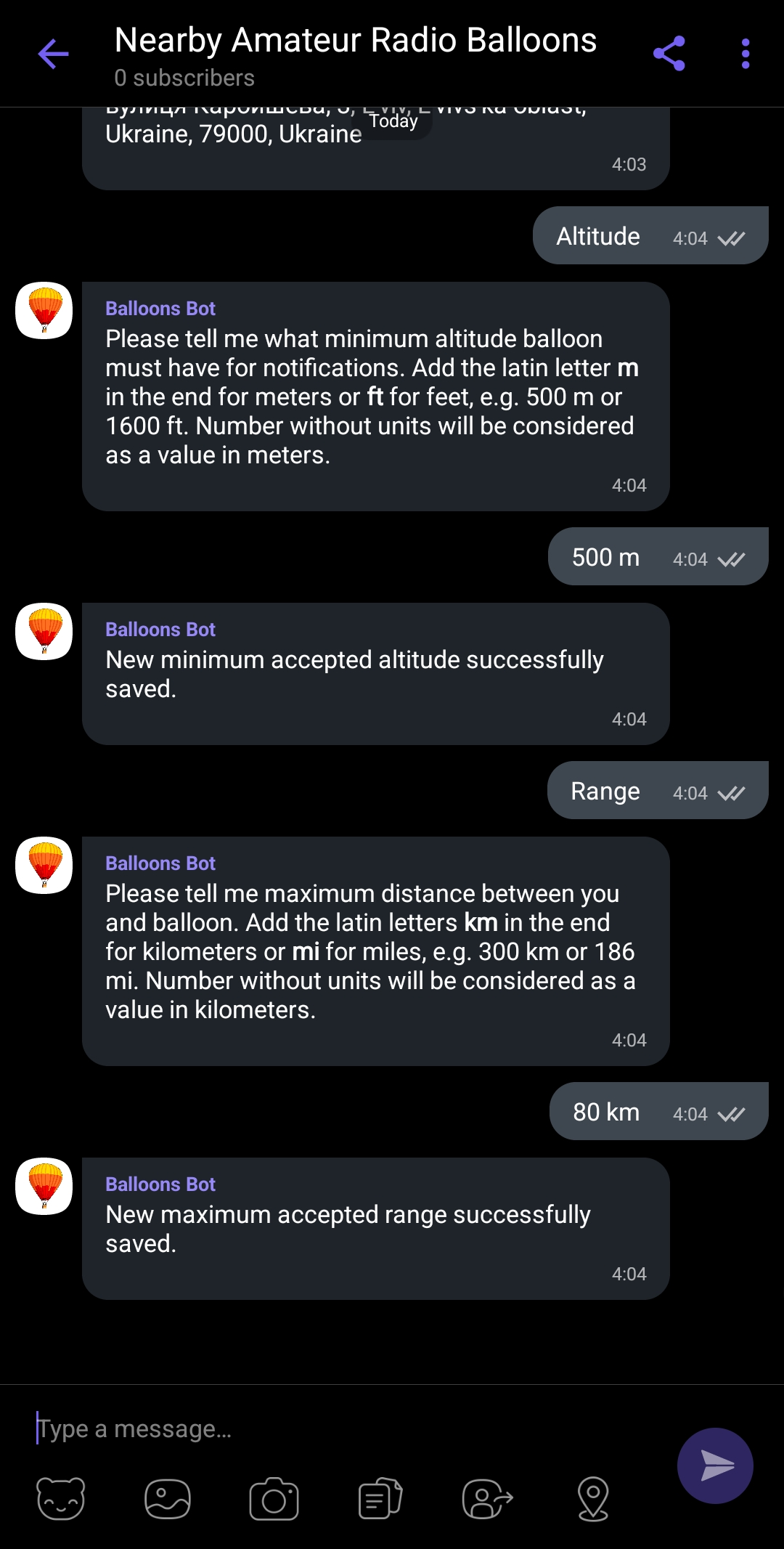
Additionally, you can set the maximum distance between you and the balloon with command /range (default range is 300 km), and the minimum balloon altitude with command /altitude (default altitude limit is 500 m).
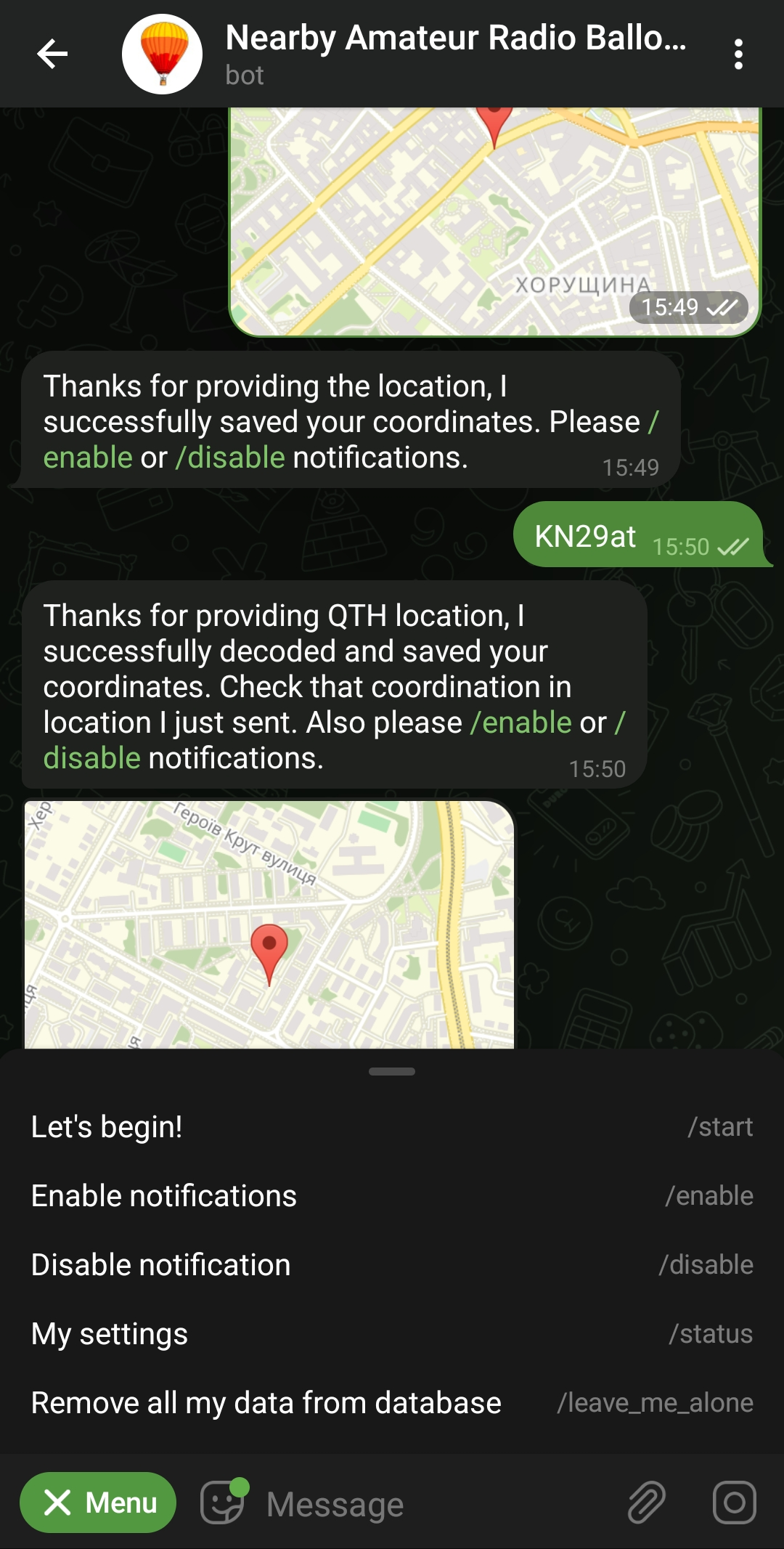
Command /status will show you notifications status, configured range, and altitude, and also saved location.
You can disable notifications at any time with the command /disable, and also remove all your data from the bot’s database with the command /leave_me_alone.
Viber-bot Nearby Amateur Radio Balloons NearbyBalloonBot
A similar bot is available for the Viber messenger. Right after opening the chat, you will receive a welcome message and an offer to provide a location. Submit your location and enable notifications to get started with the bot.
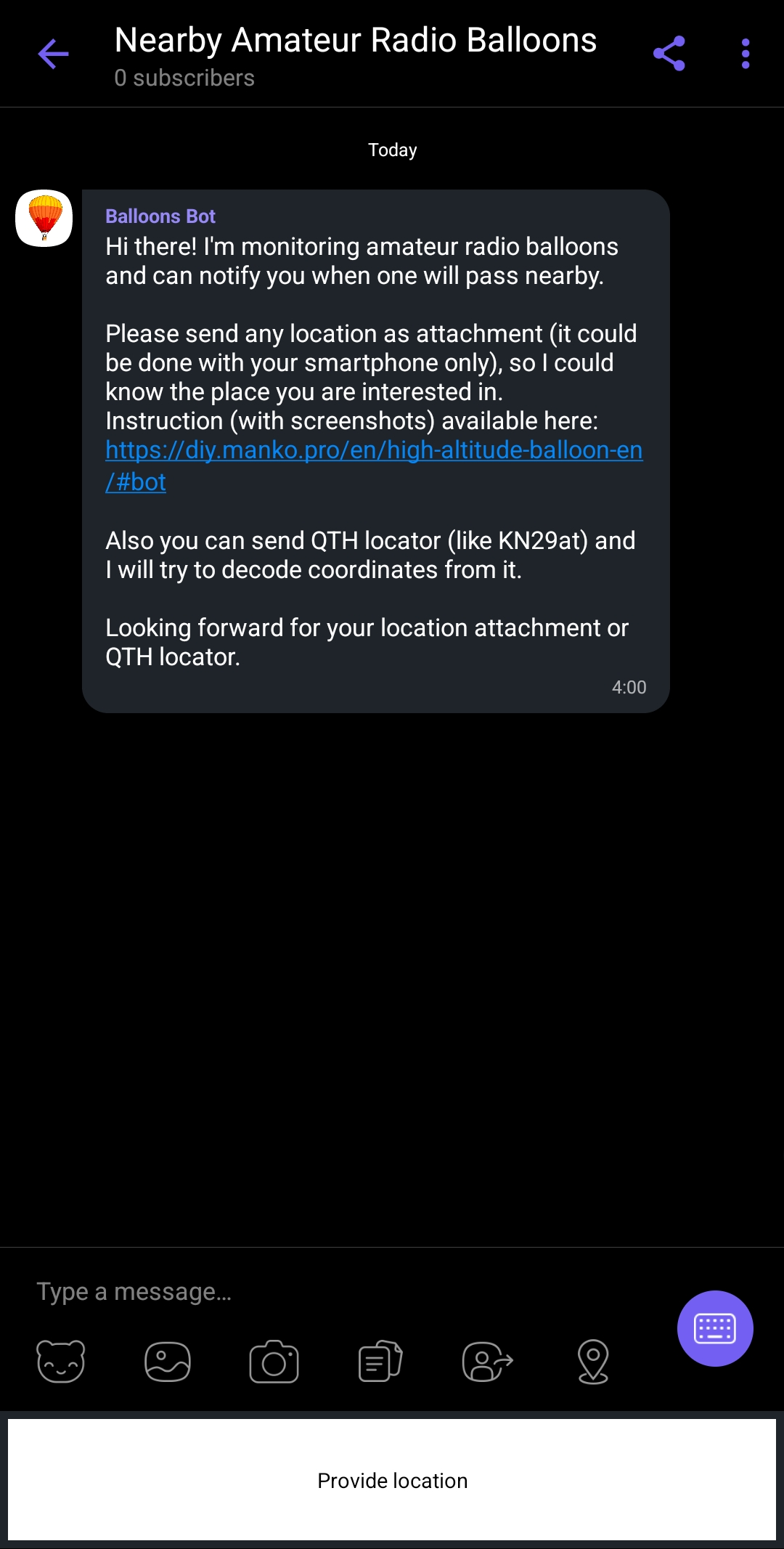
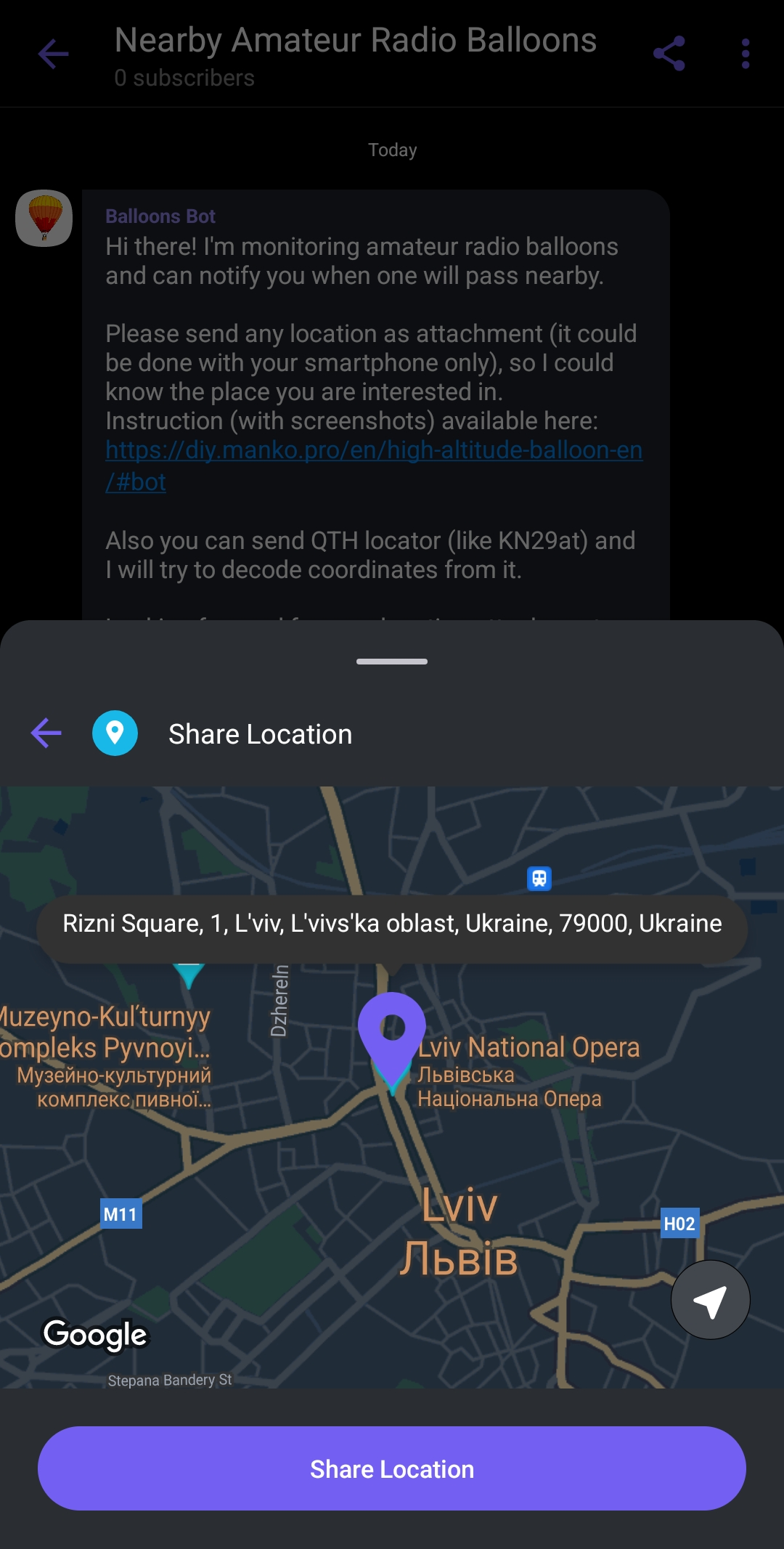

Alternatively, you can send your QTH locator to be recognized and used as a monitoring location.
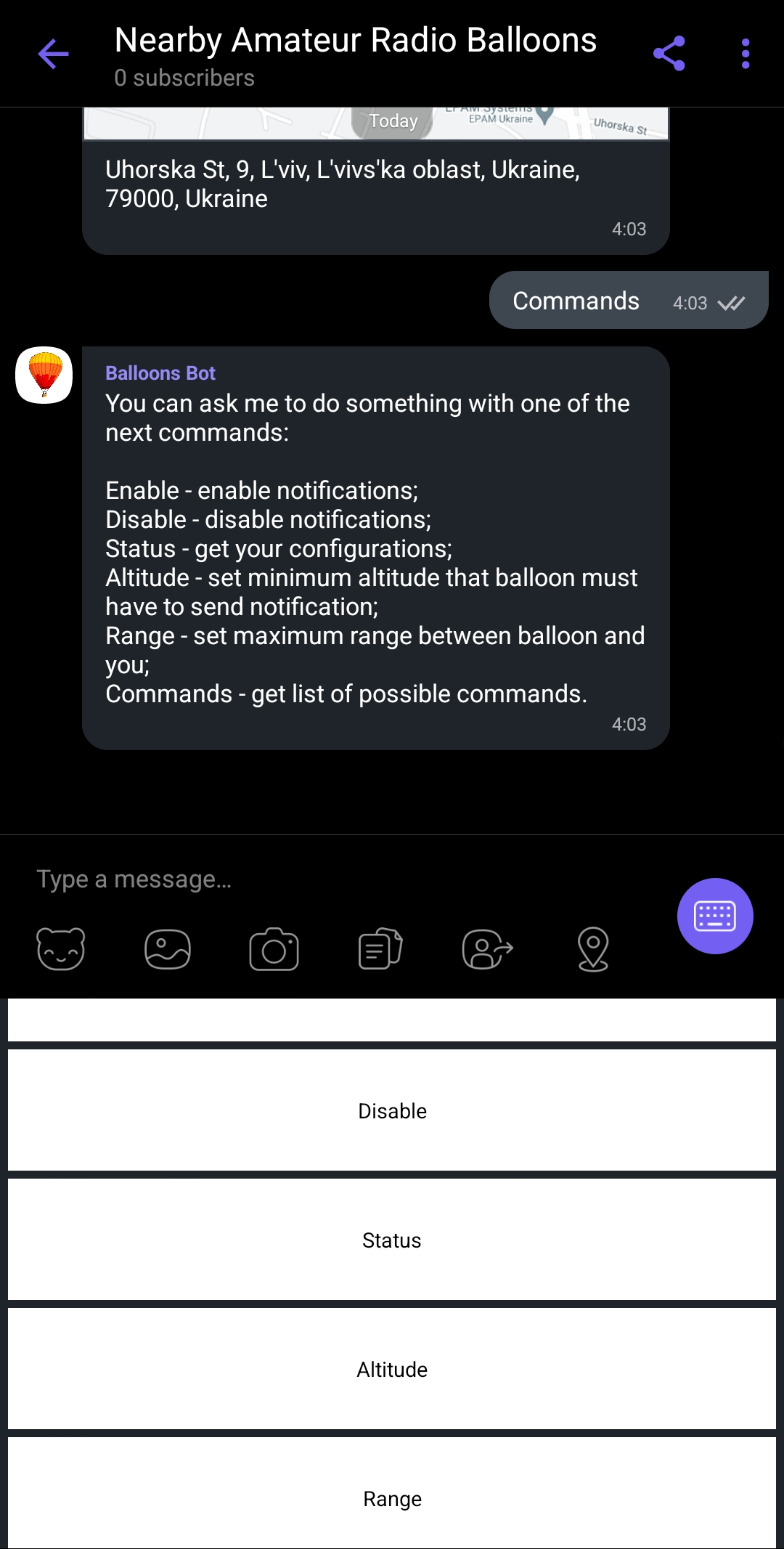
Use message Commands to get a list of available commands:
- Enable – enable notifications
- Disable – disable notifications
- Status – get your configurations
- Altitude – set the minimum altitude that the balloon must have to send a notification
- Range – set a maximum range between the balloon and you
Those bots (as well as the map above) are still in development and testing, so if you found any bug or issue – I will be glad to get a report. Same with new ideas you have.
73!
de UR5WKM